

- agent has too many tools at its disposal and makes poor decisions about which tool to call next
- context grows too complex for a single agent to keep track of
- there is a need for multiple specialization areas in the system (e.g. planner, researcher, math expert, etc.)
- Modularity: Separate agents make it easier to develop, test, and maintain agentic systems.
- Specialization: You can create expert agents focused on specific domains, which helps with the overall system performance.
- Control: You can explicitly control how agents communicate (as opposed to relying on function calling).
Multi-agent architectures
 There are several ways to connect agents in a multi-agent system:
There are several ways to connect agents in a multi-agent system:
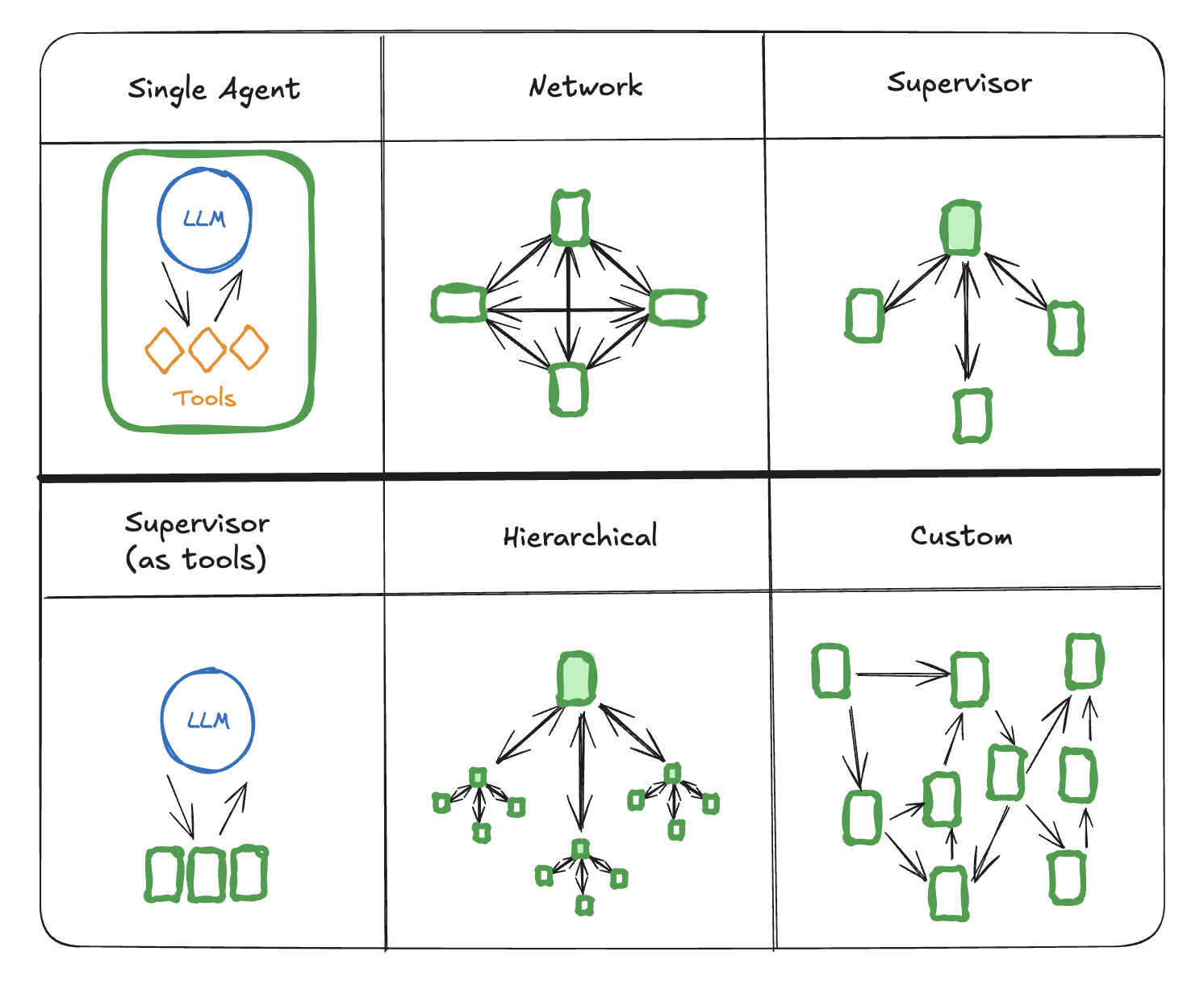
- Network: each agent can communicate with every other agent. Any agent can decide which other agent to call next.
- Supervisor: each agent communicates with a single supervisor agent. Supervisor agent makes decisions on which agent should be called next.
- Supervisor (tool-calling): this is a special case of supervisor architecture. Individual agents can be represented as tools. In this case, a supervisor agent uses a tool-calling LLM to decide which of the agent tools to call, as well as the arguments to pass to those agents.
- Hierarchical: you can define a multi-agent system with a supervisor of supervisors. This is a generalization of the supervisor architecture and allows for more complex control flows.
- Custom multi-agent workflow: each agent communicates with only a subset of agents. Parts of the flow are deterministic, and only some agents can decide which other agents to call next.
Handoffs
In multi-agent architectures, agents can be represented as graph nodes. Each agent node executes its step(s) and decides whether to finish execution or route to another agent, including potentially routing to itself (e.g., running in a loop). A common pattern in multi-agent interactions is handoffs, where one agent hands off control to another. Handoffs allow you to specify:- destination: target agent to navigate to (e.g., name of the node to go to)
- payload: information to pass to that agent (e.g., state update)
Command object that allows you to combine both control flow and state updates:
alice and bob (subgraph nodes in a parent graph), and alice needs to navigate to bob, you can set graph: Command.PARNT in the Command object:
If you need to support visualization for subgraphs communicating using/ you would need to do this:
Command({ graph: Command.PARENT }) you would need to wrap them in a node function with Command annotation:Instead of this:Handoffs as tools
One of the most common agent types is a tool-calling agent. For those types of agents, a common pattern is wrapping a handoff in a tool call:If you want to use tools that return
Command, you can use the prebuilt createReactAgent / ToolNode components, or else implement your own logic:Network
In this architecture, agents are defined as graph nodes. Each agent can communicate with every other agent (many-to-many connections) and can decide which agent to call next. This architecture is good for problems that do not have a clear hierarchy of agents or a specific sequence in which agents should be called.Supervisor
In this architecture, we define agents as nodes and add a supervisor node (LLM) that decides which agent nodes should be called next. We useCommand to route execution to the appropriate agent node based on supervisor’s decision. This architecture also lends itself well to running multiple agents in parallel or using map-reduce pattern.
Supervisor
In this variant of the supervisor architecture, we define a supervisor agent which is responsible for calling sub-agents. The sub-agents are exposed to the supervisor as tools, and the supervisor agent decides which tool to call next. The supervisor agent follows a standard implementation as an LLM running in a while loop calling tools until it decides to stop.Hierarchical
As you add more agents to your system, it might become too hard for the supervisor to manage all of them. The supervisor might start making poor decisions about which agent to call next, or the context might become too complex for a single supervisor to keep track of. In other words, you end up with the same problems that motivated the multi-agent architecture in the first place. To address this, you can design your system hierarchically. For example, you can create separate, specialized teams of agents managed by individual supervisors, and a top-level supervisor to manage the teams.Custom multi-agent workflow
In this architecture we add individual agents as graph nodes and define the order in which agents are called ahead of time, in a custom workflow. In LangGraph the workflow can be defined in two ways:- Explicit control flow (normal edges): LangGraph allows you to explicitly define the control flow of your application (i.e. the sequence of how agents communicate) explicitly, via normal graph edges. This is the most deterministic variant of this architecture above — we always know which agent will be called next ahead of time.
- Dynamic control flow (Command): in LangGraph you can allow LLMs to decide parts of your application control flow. This can be achieved by using
Command. A special case of this is a supervisor tool-calling architecture. In that case, the tool-calling LLM powering the supervisor agent will make decisions about the order in which the tools (agents) are being called.
Communication and state management
The most important thing when building multi-agent systems is figuring out how the agents communicate. A common, generic way for agents to communicate is via a list of messages. This opens up the following questions:- Do agents communicate via handoffs or via tool calls?
- What messages are passed from one agent to the next?
- How are handoffs represented in the list of messages?
- How do you manage state for subagents?
Handoffs vs tool calls
What is the “payload” that is being passed around between agents? In most of the architectures discussed above, the agents communicate via handoffs and pass the graph state as part of the handoff payload. Specifically, agents pass around lists of messages as part of the graph state. In the case of the supervisor with tool-calling, the payloads are tool call arguments.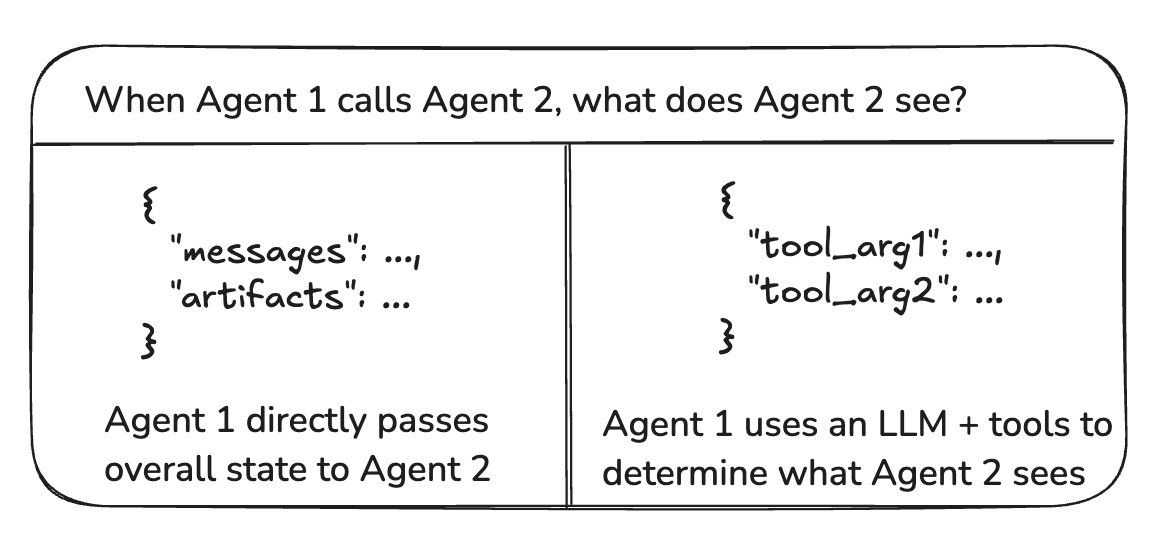
Message passing between agents
The most common way for agents to communicate is via a shared state channel, typically a list of messages. This assumes that there is always at least a single channel (key) in the state that is shared by the agents (e.g.,messages). When communicating via a shared message list, there is an additional consideration: should the agents share the full history of their thought process or only the final result?
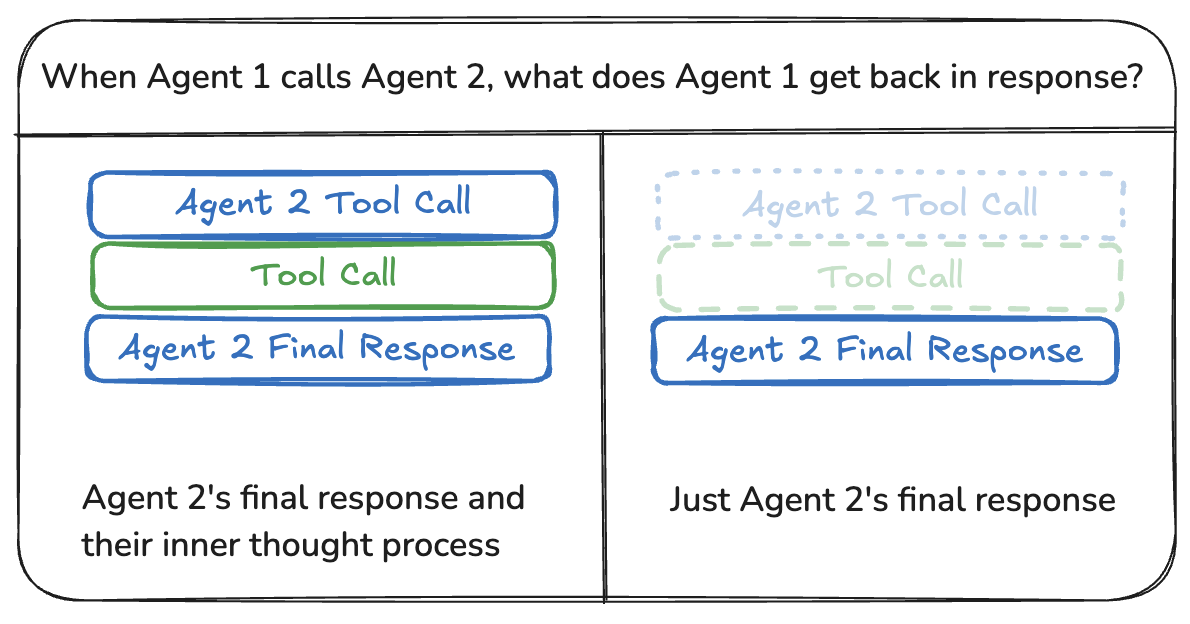
Sharing full thought process
Agents can share the full history of their thought process (i.e., “scratchpad”) with all other agents. This “scratchpad” would typically look like a list of messages. The benefit of sharing the full thought process is that it might help other agents make better decisions and improve reasoning ability for the system as a whole. The downside is that as the number of agents and their complexity grows, the “scratchpad” will grow quickly and might require additional strategies for memory management.Sharing only final results
Agents can have their own private “scratchpad” and only share the final result with the rest of the agents. This approach might work better for systems with many agents or agents that are more complex. In this case, you would need to define agents with different state schemas. For agents called as tools, the supervisor determines the inputs based on the tool schema. Additionally, LangGraph allows passing state to individual tools at runtime, so subordinate agents can access parent state, if needed.Indicating agent name in messages
It can be helpful to indicate which agent a particular AI message is from, especially for long message histories. Some LLM providers (like OpenAI) support adding aname parameter to messages — you can use that to attach the agent name to the message. If that is not supported, you can consider manually injecting the agent name into the message content, e.g., <agent>alice</agent><message>message from alice</message>.
Representing handoffs in message history
Handoffs are typically done via the LLM calling a dedicated handoff tool. This is represented as an AI message with tool calls that is passed to the next agent (LLM). Most LLM providers don’t support receiving AI messages with tool calls without corresponding tool messages. You therefore have two options:- Add an extra tool message to the message list, e.g., “Successfully transferred to agent X”
- Remove the AI message with the tool calls
State management for subagents
A common practice is to have multiple agents communicating on a shared message list, but only adding their final messages to the list. This means that any intermediate messages (e.g., tool calls) are not saved in this list. What if you do want to save these messages so that if this particular subagent is invoked in the future you can pass those back in? There are two high-level approaches to achieve that:- Store these messages in the shared message list, but filter the list before passing it to the subagent LLM. For example, you can choose to filter out all tool calls from other agents.
- Store a separate message list for each agent (e.g.,
aliceMessages) in the subagent’s graph state. This would be their “view” of what the message history looks like.
Using different state schemas
An agent might need to have a different state schema from the rest of the agents. For example, a search agent might only need to keep track of queries and retrieved documents. There are two ways to achieve this in LangGraph:- Define subgraph agents with a separate state schema. If there are no shared state keys (channels) between the subgraph and the parent graph, it’s important to add input / output transformations so that the parent graph knows how to communicate with the subgraphs.
- Define agent node functions with a private input state schema that is distinct from the overall graph state schema. This allows passing information that is only needed for executing that particular agent.